When strolling through a park or a mall, you see a lot of fur parents proudly showing off their pets. You also see a lot of people fawning over cute puppies and dogs and sometimes even running around with them. But would you be willing to run around with a robotic dog that seems to be running on its own without a human controlling it? My first instinct would probably be to run away from it or to think that our robot overlords will actually be canines. But for those who are interested in robotics, this would be something worth checking out.
Designer:

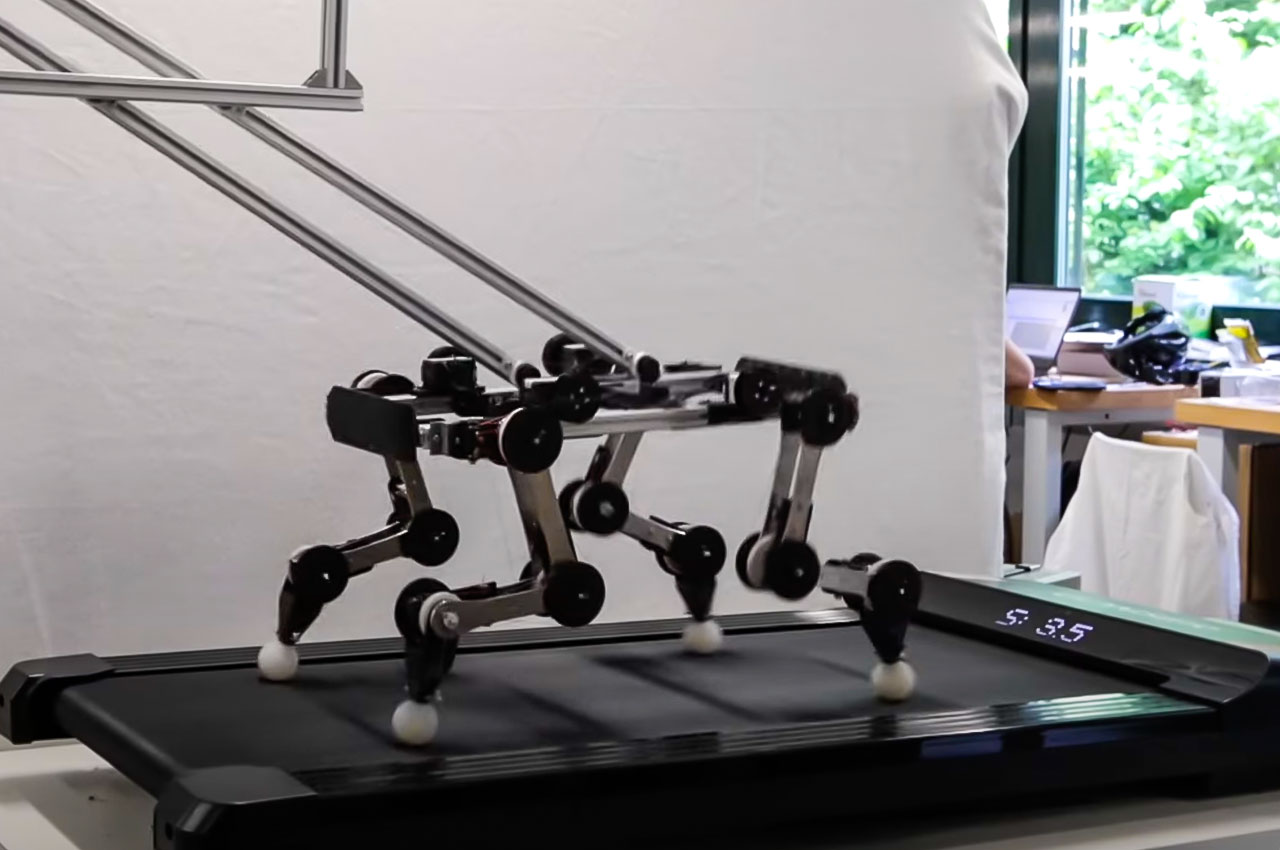
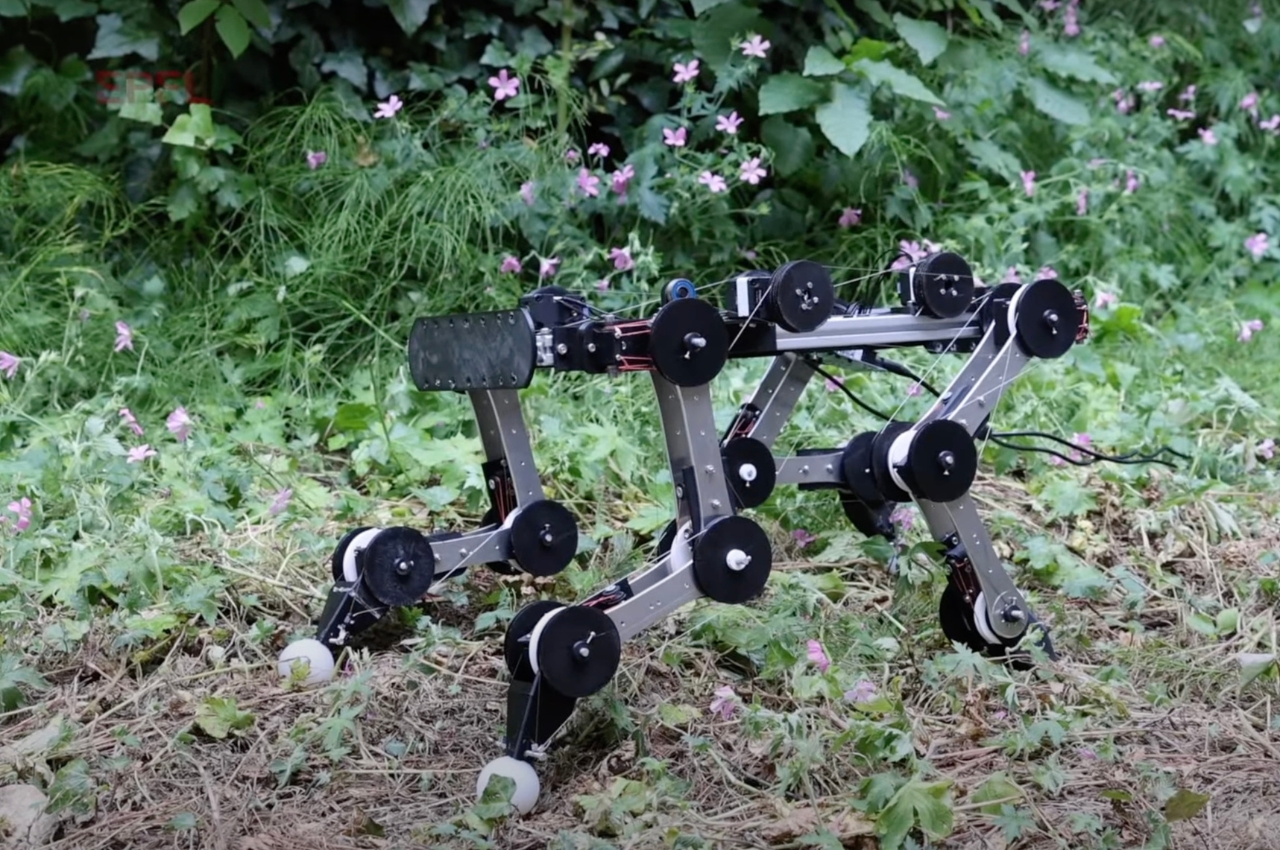
A robotics student from the EPFL research insitute in Switzerland has been able to create a robotic dog that doesn’t require control motors and can actually run on its own once you get it started. The bilaterally symmetric robot dog actually uses motion-capture data from real dogs to be able to have a more realistic albeit mechanical motion. This data was usde to guide the design as well.
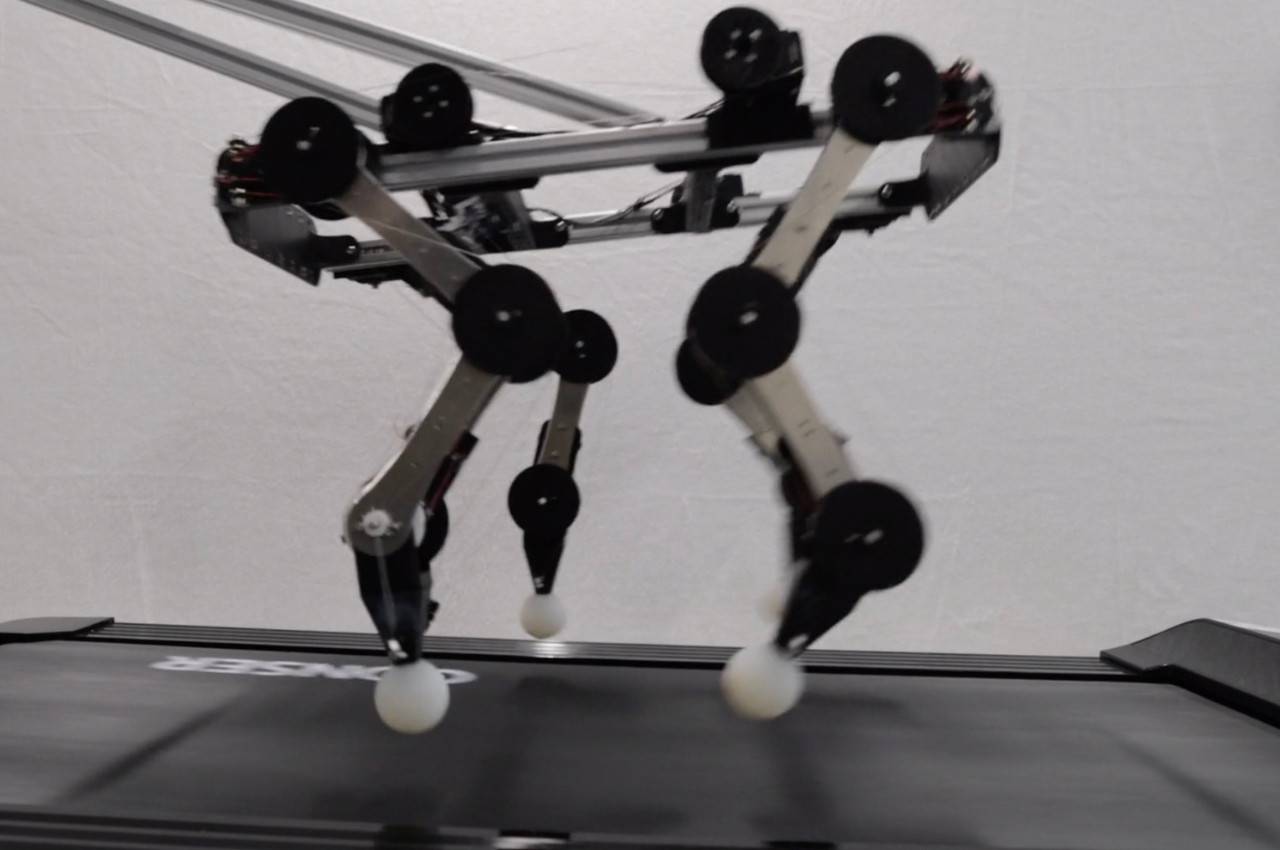
The robot dog uses various materials like metal rods for its bones, thin steel cables to represent the tendons, and 3D-printed polymer pulleys for its joints. Each of its for legs have three joints that are mechanically coordinated with each other, based on what real dogs’ joints have which lets it run like an actual dog goes. There’s also a pendulum-like counterweight that actually keeps the dog running once you get it started.
For other actions like jumping and stepping over objects, and other broader motions, it still has to use its control motors. The goal of this prototype is to basically modify the passive properties that most robotic designs have so that only simple control systems will be needed. Still, I would probably run away from robotic dogs for now, especially one that seems to be running on its own. But studies and inventions like this can be useful in creating other robotic body parts that are more bio-based.


The post first appeared on .
Related Posts